Unitree Z1 Pro
Unitree Z1 Pro
Perfect Synergy
Mobile Platforms Adaption
Diversified Application Scenarios
| Compact & Lightweight | Dexterous & Flexible | Sufficient Payload | Sufficient Accuracy | Support Joint Force Control | With Collision Protection |
Open Programming Interface and Extended Interface
The manipulator control program and control interface will be successively opened, and different actuators can be quickly replaced at the end of the manipulator.
Application
Various mobile robots’ onboard manipulator, e-commerce logistics, new consumption, daily life, etc.
|
FUNCTION |
PARAMETER |
 |
|
Backlash |
~6 arcmin |
|
|
Communication Method |
RS 485 |
|
|
Maximum Torque |
33N·m |
|
|
Encoder Resolution |
15bit |
|
|
Weight |
405g |
|
|
Force Control Accuracy |
~0.2N·m |
|
|
Size |
Φ65*52mm |
|
|
Control Frequency |
1KHz |
|
|
Reducer |
Harmonic Reducer |
|
|
Bearing |
Industrial grade cross roller |
|
|
Reduction Ratio |
60+ |
|
|
Motor Sensing Feedback |
Torque, Angle, Angular Velocity |
|
|
Voltage |
24V(Recommend) |
|
|
Motor Control Command |
Torque, Angle, Angular Velocity, Stiffness, Damping |
It can cooperate with
Aliengo or B1 Robot
and other mobile robots,
to complete complex tasks and explore various
application scenarios.
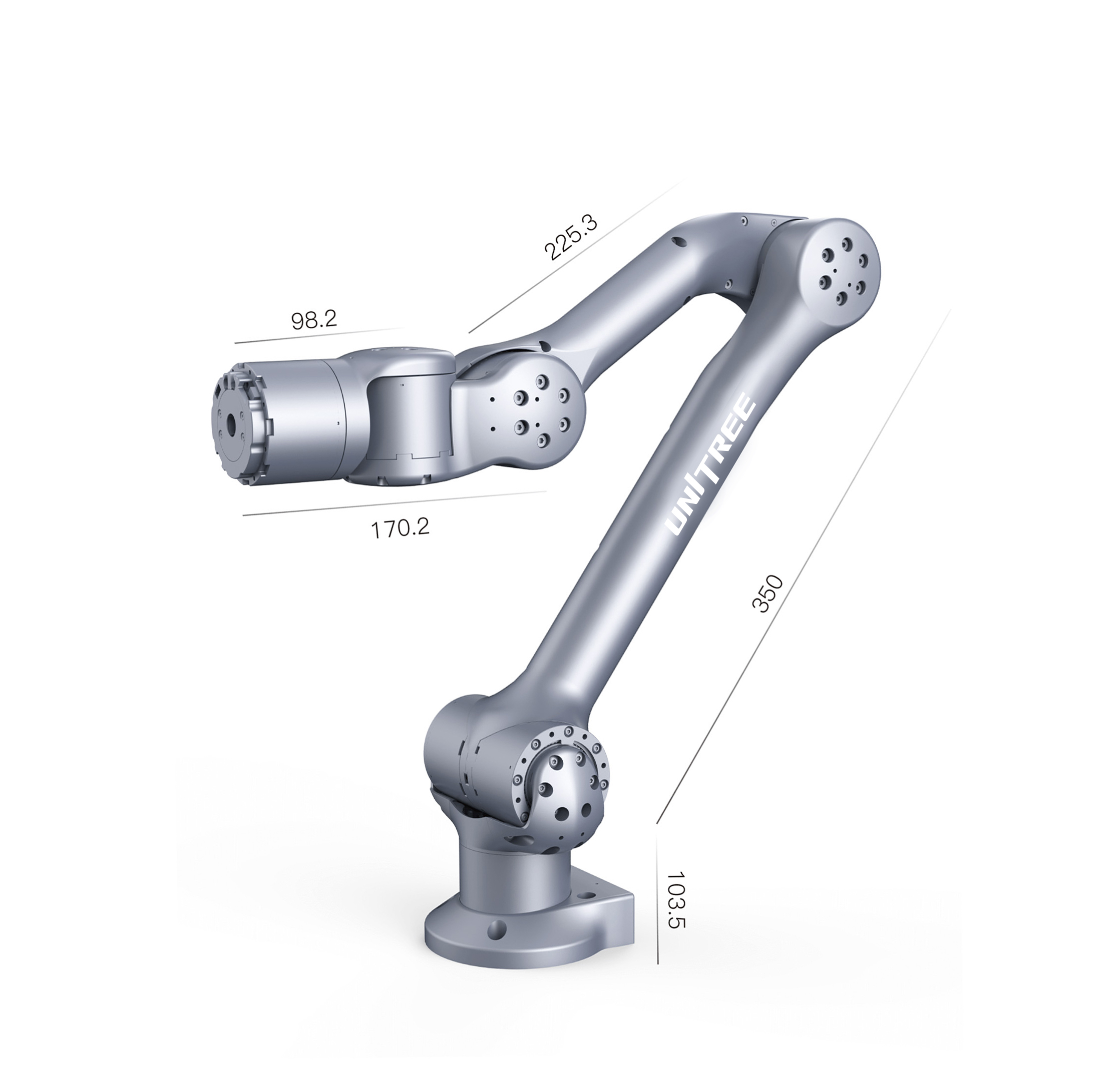
Product Parameters
|
Model |
Z1 AIR |
Z1 PRO |
|
DOF |
6 Axis |
6 Axis |
|
Weight |
4.3kg |
4.5kg |
|
Payload |
2kg |
≥3kg |
|
Reach |
740mm |
740mm |
|
Repeatability[1] |
~0.1mm |
~0.1mm |
|
Power Supply |
Voltage 24V Current > 20A |
Voltage 24V Current > 20A |
|
Interface |
Ethernet |
Ethernet |
|
User Operating System |
Ubuntu |
Ubuntu |
|
Power |
MAX 500w |
MAX 500w |
|
Force Feedback and Collision Detection |
Provide |
Provide |
|
Control Interface[2] |
Position + Force Control |
Position + Force Control |
|
Joint |
Range |
Max Speed |
|
J1 |
±150° |
180°/s |
|
J2 |
0-180° |
180°/s |
|
J13 |
-165°-0 |
180°/s |
|
J4 |
±80° |
180°/s |
|
J5 |
±85° |
180°/s |
|
J6 |
±160° |
180°/s |
[1] It depends on the actual test according to the use requirements (the test standards of manipulator vary greatly, and the accuracy varies greatly under different test conditions).
[2] Since the reduction ratio used by each joint is relatively low, the position control stiffness of the whole machine is low. If the control mode is not optimized, there will be large position control error and shaking when the manipulator moves.
[3] This product is a civilian robot. We kindly request that all users refrain from making any dangerous modifications or using the robot in a hazardous manner.
[4] Please visit Unitree Robotics Website for more related terms and policies, and comply with local laws and regulations.
")
")
")